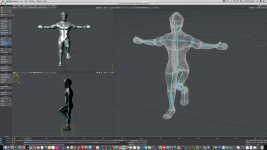
I've constructed a model in Modeler and have created the bones for it in Layout (only the spine and left side). The bones that I've created thus far include rotation limitations for the left arm and most of its joints (including elbow, wrist and fingers) as well as the left leg (including knee, foot and toes). I've also renamed all the bones with the string LT attached where necessary. I've mirrored the left arm and it's hierarchy (starting at the left shoulder) as well as the left leg and it's hierarchy (starting at the left hip). Everything was successful, the right side of the arm and leg mirrored the rotation limits as well as adopted the RT string attached to the names of the appropriate bones. I physically tested the movement of both arms and legs from the left and right side, and they both move as they should.
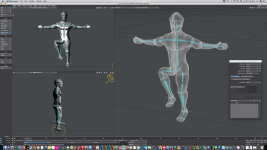
The problem seems to be occurring after I add IK to the legs. When I add IK to the LT leg it works beautifully. however, when I add it to the RT leg, upon testing it, it deforms with unexpected and unwanted results. The LT side continues to work fine with the IK, just the RT leg seems to be the problem.
I've considered recreating the bones of the RT leg manually, (as opposed to having it mirrored) but figured I'd reach out here before doing so as I'd like to learn and understand WHY this is happening only to the RT side and not the LT. I've attached images to further illustrate what I'm talking about.
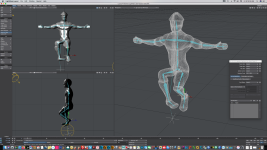
The problem seems to be occurring after I add IK to the legs. When I add IK to the LT leg it works beautifully. however, when I add it to the RT leg, upon testing it, it deforms with unexpected and unwanted results. The LT side continues to work fine with the IK, just the RT leg seems to be the problem.
I've considered recreating the bones of the RT leg manually, (as opposed to having it mirrored) but figured I'd reach out here before doing so as I'd like to learn and understand WHY this is happening only to the RT side and not the LT. I've attached images to further illustrate what I'm talking about.